retuve.hip_us.multiframe.graf
High Level Functions for Multiframe Analysis
1# Copyright 2024 Adam McArthur 2# 3# Licensed under the Apache License, Version 2.0 (the "License"); 4# you may not use this file except in compliance with the License. 5# You may obtain a copy of the License at 6# 7# http://www.apache.org/licenses/LICENSE-2.0 8# 9# Unless required by applicable law or agreed to in writing, software 10# distributed under the License is distributed on an "AS IS" BASIS, 11# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. 12# See the License for the specific language governing permissions and 13# limitations under the License. 14 15""" 16High Level Functions for Multiframe Analysis 17""" 18 19import json 20import os 21from typing import List 22 23import cv2 24import numpy as np 25from filelock import FileLock 26 27from retuve.classes.seg import SegFrameObjects 28from retuve.hip_us.classes.enums import HipLabelsUS 29from retuve.hip_us.classes.general import HipDatasUS 30from retuve.keyphrases.config import Config 31from retuve.keyphrases.enums import GrafSelectionMethod, MetricUS 32from retuve.logs import ulogger 33 34DO_CALIBRATION = False 35 36 37def _get_left_apex_angle(hip) -> bool: 38 """ 39 Check if the left apex line is flat. 40 41 :param hip: HipDataUS object. 42 43 :return: Boolean indicating if the left apex line is flat. 44 """ 45 if hip.landmarks is None: 46 return True 47 48 C, A, B = ( 49 np.array(hip.landmarks.left), 50 np.array(hip.landmarks.apex), 51 np.array((hip.landmarks.apex[0], hip.landmarks.left[1])), 52 ) 53 54 a = np.linalg.norm(C - B) 55 b = np.linalg.norm(C - A) 56 57 angle = np.arccos((a**2 + b**2 - np.linalg.norm(A - B) ** 2) / (2 * a * b)) 58 angle = np.degrees(angle) 59 60 return int(angle) 61 62 63def _get_os_ichium_area(seg_frame_objs) -> float: 64 os_ichium = [ 65 seg_obj 66 for seg_obj in seg_frame_objs 67 if seg_obj.cls == HipLabelsUS.OsIchium 68 ] 69 os_ishium_area = 0 70 # Gives a value of 0 or 2 71 if len(os_ichium) != 0: 72 os_ishium_area = round(os_ichium[0].area(), 1) 73 74 return os_ishium_area 75 76 77def _get_femoral_head_area(seg_frame_objs) -> float: 78 femoral_head = [ 79 seg_obj 80 for seg_obj in seg_frame_objs 81 if seg_obj.cls == HipLabelsUS.FemoralHead 82 ] 83 femoral_head_area = 0 84 if len(femoral_head) != 0: 85 femoral_head_area = round(femoral_head[0].area(), 1) 86 87 return femoral_head_area 88 89 90def _get_apex_right_distance(hip) -> float: 91 apex_right_distance = 0 92 if hip.landmarks: 93 apex_right_distance = abs( 94 hip.landmarks.apex[1] - hip.landmarks.right[1] 95 ) 96 97 return apex_right_distance 98 99 100def _get_femoral_head_roundness(seg_frame_objs) -> float: 101 femoral_head = [ 102 seg_obj 103 for seg_obj in seg_frame_objs 104 if seg_obj.cls == HipLabelsUS.FemoralHead 105 ] 106 roundness_ratio = 0 107 if len(femoral_head) != 0: 108 foreground_mask = ( 109 np.all(femoral_head[0].mask == [255, 255, 255], axis=-1).astype( 110 np.uint8 111 ) 112 * 255 113 ) 114 115 # Step 2: Detect edges 116 edges = cv2.Canny(foreground_mask, 50, 150) 117 118 # Step 3: Fit a circle to the detected edges 119 contours, _ = cv2.findContours( 120 edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE 121 ) 122 if contours: 123 # Get the largest contour (assuming it's the femoral head) 124 largest_contour = max(contours, key=cv2.contourArea) 125 126 # Fit a minimum enclosing circle around the contour 127 (x, y), radius = cv2.minEnclosingCircle(largest_contour) 128 circle_area = np.pi * (radius**2) 129 contour_area = cv2.contourArea(largest_contour) 130 131 # Step 4: Calculate roundness 132 # Roundness ratio of contour area to enclosing circle area (closer to 1 is more round) 133 roundness_ratio = ( 134 contour_area / circle_area if circle_area != 0 else 0 135 ) 136 137 return roundness_ratio 138 139 140def graf_frame_algo( 141 hip_zipped_data, 142 max_alpha, 143 first_illium_frame, 144 last_illium_frame, 145 file_id=None, 146): 147 """ 148 Get the Graf Frame for the hip US module as a weighted 149 mix of the max alpha value and flatness of the angle. 150 151 See an analysis of how these weights were found here: https://files.mcaq.me/xj3kb.png. 152 153 The code will be included directly in Retuve in the future update. 154 155 :param hip_zipped_data: The hip data and results. 156 :param max_alpha: The Max Alpha 157 :param first_illium_frame: The first illium frame. 158 :param last_illium_frame: The last illium frame. 159 160 :return: Weighted score based on alpha and flatness. 161 """ 162 163 alpha_weight = 5.6 # Largest Alpha Angle 164 line_flatness_weight = 4.71 # Flatness of illium 165 os_ishium_weight = 14.51 # Os Ichium Area 166 femoral_head_weight = 12.81 # Femoral Head Area 167 apex_right_distance_weight = 0.96 # Distance between apex and right 168 femoral_head_roundness_weight = 1.42 # Roundness of femoral head 169 graf_frame_position_weight = 0.16 # Position of the frame in the illium 170 171 hip_data, seg_frame_objs = hip_zipped_data 172 173 # Gives values between 1 and 7 174 alpha_normalisation = max_alpha / 4 175 alpha_value = round( 176 hip_data.get_metric(MetricUS.ALPHA) / alpha_normalisation, 2 177 ) 178 179 line_flattness_normalisation = 2 180 # Gives values varying between 0 and 10 181 line_flatness_value = ( 182 10 - _get_left_apex_angle(hip_data) 183 ) / line_flattness_normalisation 184 185 # Print the image area 186 image_area = seg_frame_objs.img.shape[0] * seg_frame_objs.img.shape[1] 187 188 os_ichium_normalisation = image_area / 140 189 os_ichium_value = ( 190 _get_os_ichium_area(seg_frame_objs) / os_ichium_normalisation 191 ) 192 193 # do the same thing for the femoral head 194 femoral_head_normalisation = image_area / 14 195 femoral_head_value = ( 196 _get_femoral_head_area(seg_frame_objs) / femoral_head_normalisation 197 ) 198 199 apex_right_distance_normalisation = seg_frame_objs.img.shape[0] / 20 200 apex_right_distance_value = ( 201 _get_apex_right_distance(hip_data) / apex_right_distance_normalisation 202 ) 203 204 # Weigh being in the middle third of the illium frames 205 illium_third_length = (last_illium_frame - first_illium_frame) // 3 206 middle_third_range = range( 207 first_illium_frame + illium_third_length, 208 last_illium_frame - illium_third_length, 209 ) 210 211 graf_frame_position_value = 0 212 if hip_data.frame_no in middle_third_range: 213 graf_frame_position_value = 3 214 215 femoral_head_roundness_normalisation = 2 216 femoral_head_roundness_value = ( 217 _get_femoral_head_roundness(seg_frame_objs) 218 * femoral_head_roundness_normalisation 219 ) 220 221 # Calculate the weighted score based on alpha and angle flatness 222 final_score = round( 223 ( 224 alpha_weight * alpha_value 225 + line_flatness_weight * line_flatness_value 226 + os_ishium_weight * os_ichium_value 227 + femoral_head_weight * femoral_head_value 228 + apex_right_distance_weight * apex_right_distance_value 229 + graf_frame_position_weight * graf_frame_position_value 230 + femoral_head_roundness_weight * femoral_head_roundness_value 231 ), 232 2, 233 ) 234 235 if file_id and DO_CALIBRATION: 236 data = { 237 "alpha_value": alpha_value, 238 "line_flatness_value": line_flatness_value, 239 "os_ichium_value": os_ichium_value, 240 "femoral_head_value": femoral_head_value, 241 "apex_right_distance_value": apex_right_distance_value, 242 "graf_frame_position_value": graf_frame_position_value, 243 "femoral_head_roundness_value": femoral_head_roundness_value, 244 } 245 246 # Create folder for the JSON file 247 json_folder = f"./scripts/val/cali/" 248 os.makedirs(json_folder, exist_ok=True) 249 250 # Define the path to the JSON file and the lock file 251 json_file_path = f"{json_folder}/{file_id.replace('.dcm', '.json')}" 252 lock_file_path = f"{json_folder}/{file_id.replace('.dcm', '.lock')}" 253 254 # Use a file lock to prevent concurrent access issues 255 lock = FileLock(lock_file_path) 256 257 # Acquire the lock before reading or writing 258 with lock: 259 # If the JSON file already exists, load its contents; otherwise, start with an empty dictionary 260 if os.path.exists(json_file_path): 261 with open(json_file_path, "r") as f: 262 hip_data_dict = json.load(f) 263 else: 264 hip_data_dict = {} 265 266 # Add or update the data for this frame_no 267 hip_data_dict[hip_data.frame_no] = data 268 269 # Save the updated data back to the JSON file 270 with open(json_file_path, "w") as f: 271 json.dump(hip_data_dict, f, indent=4) 272 273 return final_score 274 275 276def find_graf_plane( 277 hip_datas: HipDatasUS, results: List[SegFrameObjects], config: Config 278) -> HipDatasUS: 279 """ 280 Find the Graf Plane for the hip US module. 281 282 :param hip_datas: The hip data. 283 :param results: The results of the segmentation. 284 :param config: The configuration. 285 286 :return: The hip data with the Graf Plane. 287 """ 288 289 hip_datas.graf_confs = [] 290 291 if config.hip.graf_selection_method == GrafSelectionMethod.MANUAL_FEATURES: 292 return find_graf_plane_manual_features(hip_datas, results, config) 293 294 elif config.hip.graf_selection_method == GrafSelectionMethod.OBJ_CLASSIFY: 295 raise NotImplementedError( 296 f"Unsupported Graf Selection Method: {config.hip.graf_selection_method}" 297 ) 298 299 else: 300 raise NotImplementedError( 301 f"Unsupported Graf Selection Method: {config.hip.graf_selection_method}" 302 ) 303 304 305def find_graf_plane_manual_features( 306 hip_datas: HipDatasUS, results: List[SegFrameObjects], config: Config 307) -> HipDatasUS: 308 """ 309 Find the Graf Plane for the hip US module. 310 311 :param hip_datas: The hip data. 312 :param results: The results of the segmentation. 313 314 :return: The hip data with the Graf Plane. 315 """ 316 317 if config.hip.graf_algo_threshold: 318 GRAF_THRESHOLD = config.hip.graf_algo_threshold 319 else: 320 # NOTE(adamcarthur) - this is so that previous behavior is maintained 321 GRAF_THRESHOLD = 1 322 323 any_good_graf_data = [ 324 (hip_data, seg_frame_objs) 325 for hip_data, seg_frame_objs in zip(hip_datas, results) 326 if hip_data.metrics 327 and all(metric.value != 0 for metric in hip_data.metrics) 328 ] 329 330 if len(any_good_graf_data) == 0: 331 ulogger.warning("No good graf frames found") 332 hip_datas.recorded_error.append("No Perfect Grafs Frames found.") 333 hip_datas.recorded_error.critical = True 334 any_good_graf_frames = hip_datas.hip_datas 335 any_good_graf_data = zip(any_good_graf_frames, results) 336 else: 337 any_good_graf_frames, _ = zip(*any_good_graf_data) 338 339 # get max alpha frame 340 max_alpha = max( 341 any_good_graf_frames, 342 key=lambda hip_data: hip_data.get_metric(MetricUS.ALPHA), 343 ).get_metric(MetricUS.ALPHA) 344 345 all_illiums = [ 346 hip_data 347 for hip_data in hip_datas 348 if hip_data.get_metric(MetricUS.ALPHA) != 0 349 ] 350 351 if len(all_illiums) > 0: 352 hip_datas.graf_confs = [ 353 graf_frame_algo( 354 (hip_data, seg_frame_objs), 355 max_alpha, 356 all_illiums[0].frame_no, 357 all_illiums[-1].frame_no, 358 None, 359 ) 360 / GRAF_THRESHOLD 361 for hip_data, seg_frame_objs in zip(hip_datas, results) 362 ] 363 364 if len(all_illiums) != 0: 365 first_illium_frame = all_illiums[0].frame_no 366 last_illium_frame = all_illiums[-1].frame_no 367 368 if max_alpha == 0: 369 hip_datas.recorded_error.append("Max Alpha is 0.") 370 hip_datas.recorded_error.critical = True 371 return hip_datas 372 373 if not hasattr(hip_datas, "file_id"): 374 hip_datas.file_id = None 375 376 graf_hip, _ = max( 377 any_good_graf_data, 378 key=lambda hip_zipped_data: graf_frame_algo( 379 hip_zipped_data, 380 max_alpha, 381 first_illium_frame, 382 last_illium_frame, 383 hip_datas.file_id, 384 ), 385 ) 386 387 # pick the index closest to the center 388 center = len(hip_datas.hip_datas) // 2 389 graf_frame = min( 390 [graf_hip.frame_no], 391 key=lambda index: abs(index - center), 392 ) 393 394 best_conf = hip_datas.graf_confs[graf_frame] 395 if best_conf < 1: 396 ulogger.warning("No high-quality Graf Frames found") 397 hip_datas.recorded_error.append("No High-Quality Graf Frames found.") 398 hip_datas.recorded_error.critical = True 399 return hip_datas 400 401 hip_datas.graf_frame = graf_frame 402 403 hip_datas.grafs_hip = [ 404 hip for hip in hip_datas if hip.frame_no == graf_frame 405 ][0] 406 407 return hip_datas
DO_CALIBRATION =
False
def
graf_frame_algo( hip_zipped_data, max_alpha, first_illium_frame, last_illium_frame, file_id=None):
141def graf_frame_algo( 142 hip_zipped_data, 143 max_alpha, 144 first_illium_frame, 145 last_illium_frame, 146 file_id=None, 147): 148 """ 149 Get the Graf Frame for the hip US module as a weighted 150 mix of the max alpha value and flatness of the angle. 151 152 See an analysis of how these weights were found here: https://files.mcaq.me/xj3kb.png. 153 154 The code will be included directly in Retuve in the future update. 155 156 :param hip_zipped_data: The hip data and results. 157 :param max_alpha: The Max Alpha 158 :param first_illium_frame: The first illium frame. 159 :param last_illium_frame: The last illium frame. 160 161 :return: Weighted score based on alpha and flatness. 162 """ 163 164 alpha_weight = 5.6 # Largest Alpha Angle 165 line_flatness_weight = 4.71 # Flatness of illium 166 os_ishium_weight = 14.51 # Os Ichium Area 167 femoral_head_weight = 12.81 # Femoral Head Area 168 apex_right_distance_weight = 0.96 # Distance between apex and right 169 femoral_head_roundness_weight = 1.42 # Roundness of femoral head 170 graf_frame_position_weight = 0.16 # Position of the frame in the illium 171 172 hip_data, seg_frame_objs = hip_zipped_data 173 174 # Gives values between 1 and 7 175 alpha_normalisation = max_alpha / 4 176 alpha_value = round( 177 hip_data.get_metric(MetricUS.ALPHA) / alpha_normalisation, 2 178 ) 179 180 line_flattness_normalisation = 2 181 # Gives values varying between 0 and 10 182 line_flatness_value = ( 183 10 - _get_left_apex_angle(hip_data) 184 ) / line_flattness_normalisation 185 186 # Print the image area 187 image_area = seg_frame_objs.img.shape[0] * seg_frame_objs.img.shape[1] 188 189 os_ichium_normalisation = image_area / 140 190 os_ichium_value = ( 191 _get_os_ichium_area(seg_frame_objs) / os_ichium_normalisation 192 ) 193 194 # do the same thing for the femoral head 195 femoral_head_normalisation = image_area / 14 196 femoral_head_value = ( 197 _get_femoral_head_area(seg_frame_objs) / femoral_head_normalisation 198 ) 199 200 apex_right_distance_normalisation = seg_frame_objs.img.shape[0] / 20 201 apex_right_distance_value = ( 202 _get_apex_right_distance(hip_data) / apex_right_distance_normalisation 203 ) 204 205 # Weigh being in the middle third of the illium frames 206 illium_third_length = (last_illium_frame - first_illium_frame) // 3 207 middle_third_range = range( 208 first_illium_frame + illium_third_length, 209 last_illium_frame - illium_third_length, 210 ) 211 212 graf_frame_position_value = 0 213 if hip_data.frame_no in middle_third_range: 214 graf_frame_position_value = 3 215 216 femoral_head_roundness_normalisation = 2 217 femoral_head_roundness_value = ( 218 _get_femoral_head_roundness(seg_frame_objs) 219 * femoral_head_roundness_normalisation 220 ) 221 222 # Calculate the weighted score based on alpha and angle flatness 223 final_score = round( 224 ( 225 alpha_weight * alpha_value 226 + line_flatness_weight * line_flatness_value 227 + os_ishium_weight * os_ichium_value 228 + femoral_head_weight * femoral_head_value 229 + apex_right_distance_weight * apex_right_distance_value 230 + graf_frame_position_weight * graf_frame_position_value 231 + femoral_head_roundness_weight * femoral_head_roundness_value 232 ), 233 2, 234 ) 235 236 if file_id and DO_CALIBRATION: 237 data = { 238 "alpha_value": alpha_value, 239 "line_flatness_value": line_flatness_value, 240 "os_ichium_value": os_ichium_value, 241 "femoral_head_value": femoral_head_value, 242 "apex_right_distance_value": apex_right_distance_value, 243 "graf_frame_position_value": graf_frame_position_value, 244 "femoral_head_roundness_value": femoral_head_roundness_value, 245 } 246 247 # Create folder for the JSON file 248 json_folder = f"./scripts/val/cali/" 249 os.makedirs(json_folder, exist_ok=True) 250 251 # Define the path to the JSON file and the lock file 252 json_file_path = f"{json_folder}/{file_id.replace('.dcm', '.json')}" 253 lock_file_path = f"{json_folder}/{file_id.replace('.dcm', '.lock')}" 254 255 # Use a file lock to prevent concurrent access issues 256 lock = FileLock(lock_file_path) 257 258 # Acquire the lock before reading or writing 259 with lock: 260 # If the JSON file already exists, load its contents; otherwise, start with an empty dictionary 261 if os.path.exists(json_file_path): 262 with open(json_file_path, "r") as f: 263 hip_data_dict = json.load(f) 264 else: 265 hip_data_dict = {} 266 267 # Add or update the data for this frame_no 268 hip_data_dict[hip_data.frame_no] = data 269 270 # Save the updated data back to the JSON file 271 with open(json_file_path, "w") as f: 272 json.dump(hip_data_dict, f, indent=4) 273 274 return final_score
Get the Graf Frame for the hip US module as a weighted mix of the max alpha value and flatness of the angle.
See an analysis of how these weights were found here: https://files.mcaq.me/xj3kb.png.
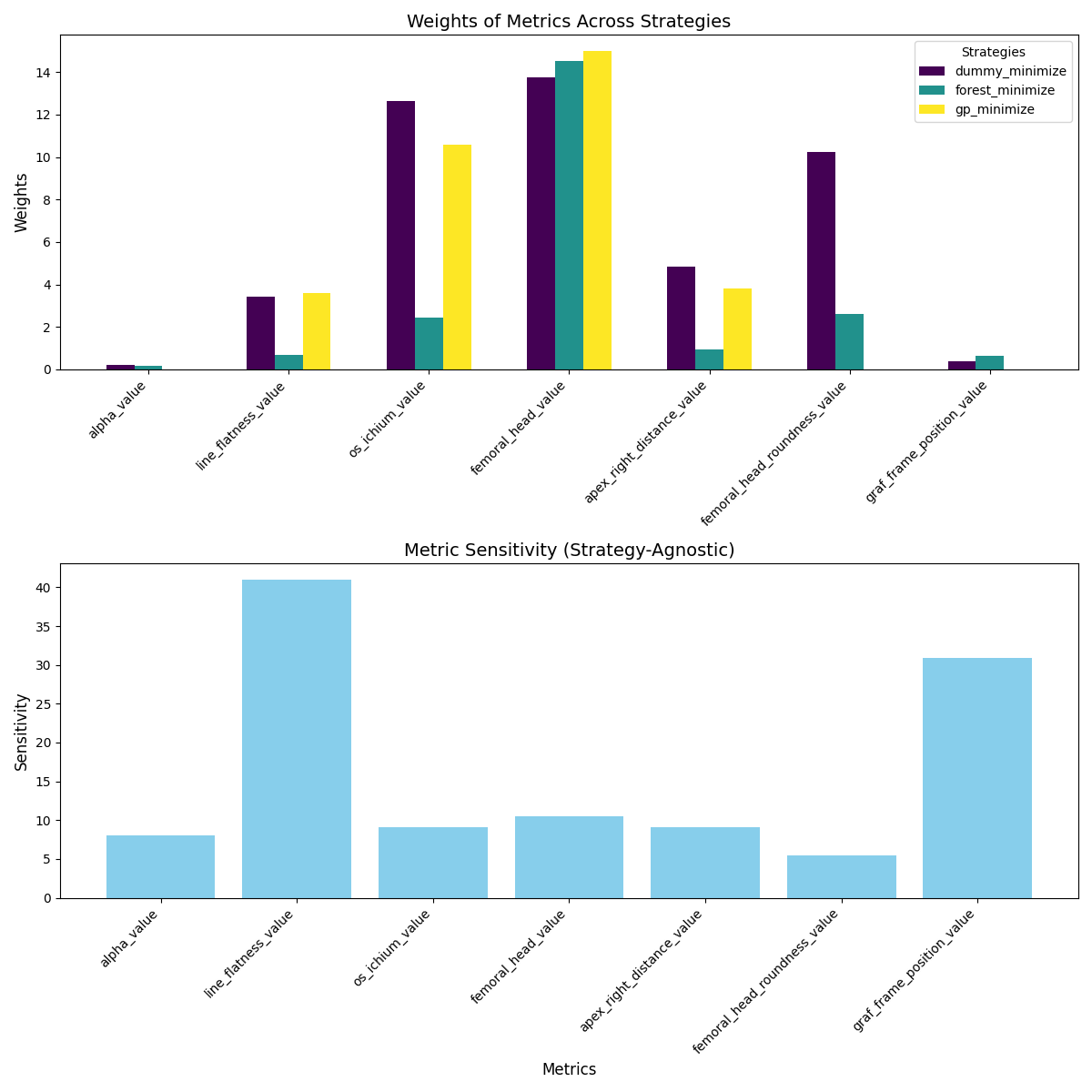{kind=link}
The code will be included directly in Retuve in the future update.
Parameters
- hip_zipped_data: The hip data and results.
- max_alpha: The Max Alpha
- first_illium_frame: The first illium frame.
- last_illium_frame: The last illium frame.
Returns
Weighted score based on alpha and flatness.
def
find_graf_plane( hip_datas: retuve.hip_us.classes.general.HipDatasUS, results: List[retuve.classes.seg.SegFrameObjects], config: retuve.keyphrases.config.Config) -> retuve.hip_us.classes.general.HipDatasUS:
277def find_graf_plane( 278 hip_datas: HipDatasUS, results: List[SegFrameObjects], config: Config 279) -> HipDatasUS: 280 """ 281 Find the Graf Plane for the hip US module. 282 283 :param hip_datas: The hip data. 284 :param results: The results of the segmentation. 285 :param config: The configuration. 286 287 :return: The hip data with the Graf Plane. 288 """ 289 290 hip_datas.graf_confs = [] 291 292 if config.hip.graf_selection_method == GrafSelectionMethod.MANUAL_FEATURES: 293 return find_graf_plane_manual_features(hip_datas, results, config) 294 295 elif config.hip.graf_selection_method == GrafSelectionMethod.OBJ_CLASSIFY: 296 raise NotImplementedError( 297 f"Unsupported Graf Selection Method: {config.hip.graf_selection_method}" 298 ) 299 300 else: 301 raise NotImplementedError( 302 f"Unsupported Graf Selection Method: {config.hip.graf_selection_method}" 303 )
Find the Graf Plane for the hip US module.
Parameters
- hip_datas: The hip data.
- results: The results of the segmentation.
- config: The configuration.
Returns
The hip data with the Graf Plane.
def
find_graf_plane_manual_features( hip_datas: retuve.hip_us.classes.general.HipDatasUS, results: List[retuve.classes.seg.SegFrameObjects], config: retuve.keyphrases.config.Config) -> retuve.hip_us.classes.general.HipDatasUS:
306def find_graf_plane_manual_features( 307 hip_datas: HipDatasUS, results: List[SegFrameObjects], config: Config 308) -> HipDatasUS: 309 """ 310 Find the Graf Plane for the hip US module. 311 312 :param hip_datas: The hip data. 313 :param results: The results of the segmentation. 314 315 :return: The hip data with the Graf Plane. 316 """ 317 318 if config.hip.graf_algo_threshold: 319 GRAF_THRESHOLD = config.hip.graf_algo_threshold 320 else: 321 # NOTE(adamcarthur) - this is so that previous behavior is maintained 322 GRAF_THRESHOLD = 1 323 324 any_good_graf_data = [ 325 (hip_data, seg_frame_objs) 326 for hip_data, seg_frame_objs in zip(hip_datas, results) 327 if hip_data.metrics 328 and all(metric.value != 0 for metric in hip_data.metrics) 329 ] 330 331 if len(any_good_graf_data) == 0: 332 ulogger.warning("No good graf frames found") 333 hip_datas.recorded_error.append("No Perfect Grafs Frames found.") 334 hip_datas.recorded_error.critical = True 335 any_good_graf_frames = hip_datas.hip_datas 336 any_good_graf_data = zip(any_good_graf_frames, results) 337 else: 338 any_good_graf_frames, _ = zip(*any_good_graf_data) 339 340 # get max alpha frame 341 max_alpha = max( 342 any_good_graf_frames, 343 key=lambda hip_data: hip_data.get_metric(MetricUS.ALPHA), 344 ).get_metric(MetricUS.ALPHA) 345 346 all_illiums = [ 347 hip_data 348 for hip_data in hip_datas 349 if hip_data.get_metric(MetricUS.ALPHA) != 0 350 ] 351 352 if len(all_illiums) > 0: 353 hip_datas.graf_confs = [ 354 graf_frame_algo( 355 (hip_data, seg_frame_objs), 356 max_alpha, 357 all_illiums[0].frame_no, 358 all_illiums[-1].frame_no, 359 None, 360 ) 361 / GRAF_THRESHOLD 362 for hip_data, seg_frame_objs in zip(hip_datas, results) 363 ] 364 365 if len(all_illiums) != 0: 366 first_illium_frame = all_illiums[0].frame_no 367 last_illium_frame = all_illiums[-1].frame_no 368 369 if max_alpha == 0: 370 hip_datas.recorded_error.append("Max Alpha is 0.") 371 hip_datas.recorded_error.critical = True 372 return hip_datas 373 374 if not hasattr(hip_datas, "file_id"): 375 hip_datas.file_id = None 376 377 graf_hip, _ = max( 378 any_good_graf_data, 379 key=lambda hip_zipped_data: graf_frame_algo( 380 hip_zipped_data, 381 max_alpha, 382 first_illium_frame, 383 last_illium_frame, 384 hip_datas.file_id, 385 ), 386 ) 387 388 # pick the index closest to the center 389 center = len(hip_datas.hip_datas) // 2 390 graf_frame = min( 391 [graf_hip.frame_no], 392 key=lambda index: abs(index - center), 393 ) 394 395 best_conf = hip_datas.graf_confs[graf_frame] 396 if best_conf < 1: 397 ulogger.warning("No high-quality Graf Frames found") 398 hip_datas.recorded_error.append("No High-Quality Graf Frames found.") 399 hip_datas.recorded_error.critical = True 400 return hip_datas 401 402 hip_datas.graf_frame = graf_frame 403 404 hip_datas.grafs_hip = [ 405 hip for hip in hip_datas if hip.frame_no == graf_frame 406 ][0] 407 408 return hip_datas
Find the Graf Plane for the hip US module.
Parameters
- hip_datas: The hip data.
- results: The results of the segmentation.
Returns
The hip data with the Graf Plane.